
越来越多的自动化厂家使用工业机器人来完成任务,不仅提高工人的安全性,还增加总产量,同时减少浪费和运营成本。随着工业机器人在制造环境中变得越来越普遍,对不同类型的工业机器人的需求也在不断增加,以适应特定的应用和行业。小编将和小伙伴们一起探讨市场上有哪些类型的工业机器人,它们是如何工作的,以及它们通常用于哪些应用或行业。
直角坐标机器人
直角坐标机器人也被称为线性机器人或龙门机器人,是在三个线性轴上工作的工业机器人,使用直角坐标系(X、Y和Z),这意味着它们在3轴(上下、内外和左右)上直线移动。
很多厂家选择直角坐标机器人是因为其配置高度灵活,使用户有能力调整机器人的速度、精度、行程长度和尺寸。
直角坐标机器人是工业应用中最常用的机器人类型之一,经常被用于数控机床和3D打印。

直角坐标机器人
四轴机器人
四轴机器人在三个轴(X,Y和Z)上运行,并且也有旋转运动;它擅长横向移动,通常比直角坐标机器人移动更快,更容易集成。
通常,四轴机器人用于组装和码垛,以及生物医学应用。

四轴机器人
关节机器人
关节机器人的机械运动和结构非常类似于人的手臂,该臂安装在带有扭转接头的底座上。臂本身可以具有从两个旋转接头到十个作为轴的旋转接头,每个额外的接头或轴允许更大程度的运动。
大多数关节机器人利用四轴或六轴。关节式机器人的典型应用是装配、电弧焊、材料搬运、机器维护和包装。

关节机器人
圆柱形机器人
圆柱形机器人在底部有一个旋转关节和一个连接连杆的棱柱形关节。机器人有一个圆柱形的工作包,这是通过旋转轴和一个可延伸的臂来实现的,该臂以垂直和滑动的方式移动。
由于其紧凑的设计,圆柱形机器人通常用于紧凑的工作空间,用于简单的组装、机器维护或涂层应用。
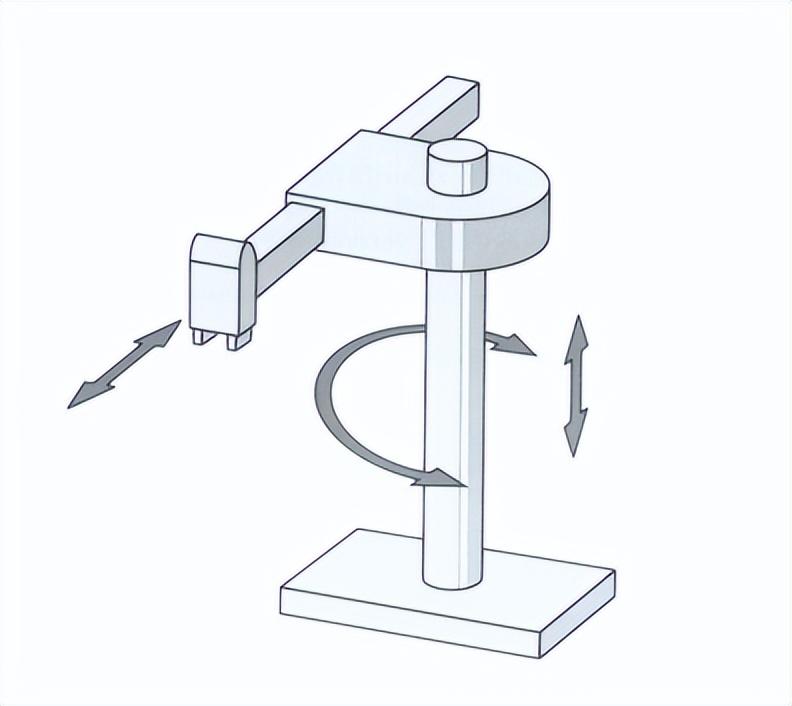
圆柱形机器人
并联机器人
并联机器人拥有三个连接到一个单一的基地,这是安装在工作区上方的手臂。由于末端执行器的每个关节都由所有三个手臂直接控制并联机器人在圆顶形状中工作,可以高速精确地移动。
并联机器人通常用于食品、制药和电子行业的快速取放应用。

并联机器人
极地机器人
极地机器人的手臂有两个旋转关节和一个线性关节,通过扭转关节连接到底座;机器人的轴一起工作以形成极坐标,这允许机器人具有球形工作包络。
极地机器人被认为是最早开发的工业机器人之一,通常用于压铸,注塑,焊接和材料处理。
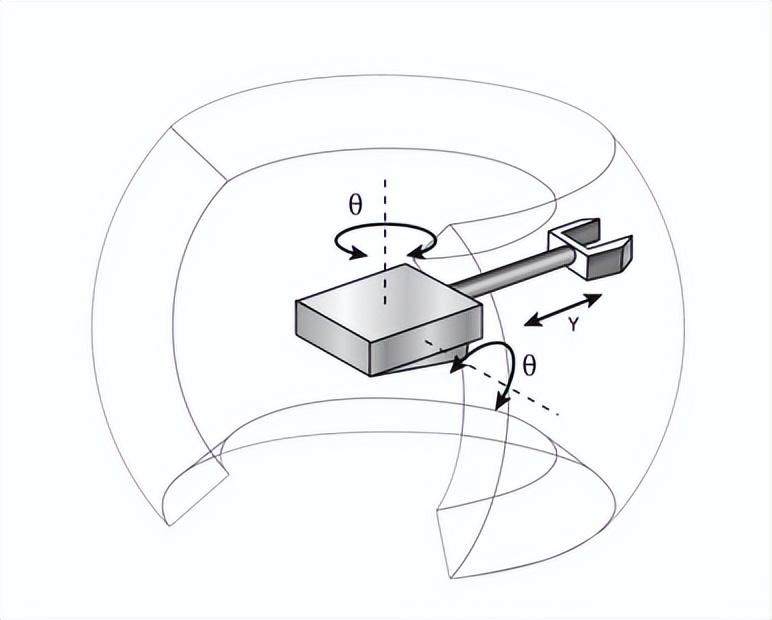
极地机器人
协作机器人
协作机器人是可以在共享工作空间中直接和安全地与人类互动的机器人。它比传统六轴更具有柔性,本体集成了若干传感器,可以与人协作;通常用于取放、码垛、质量检测和机器维护。
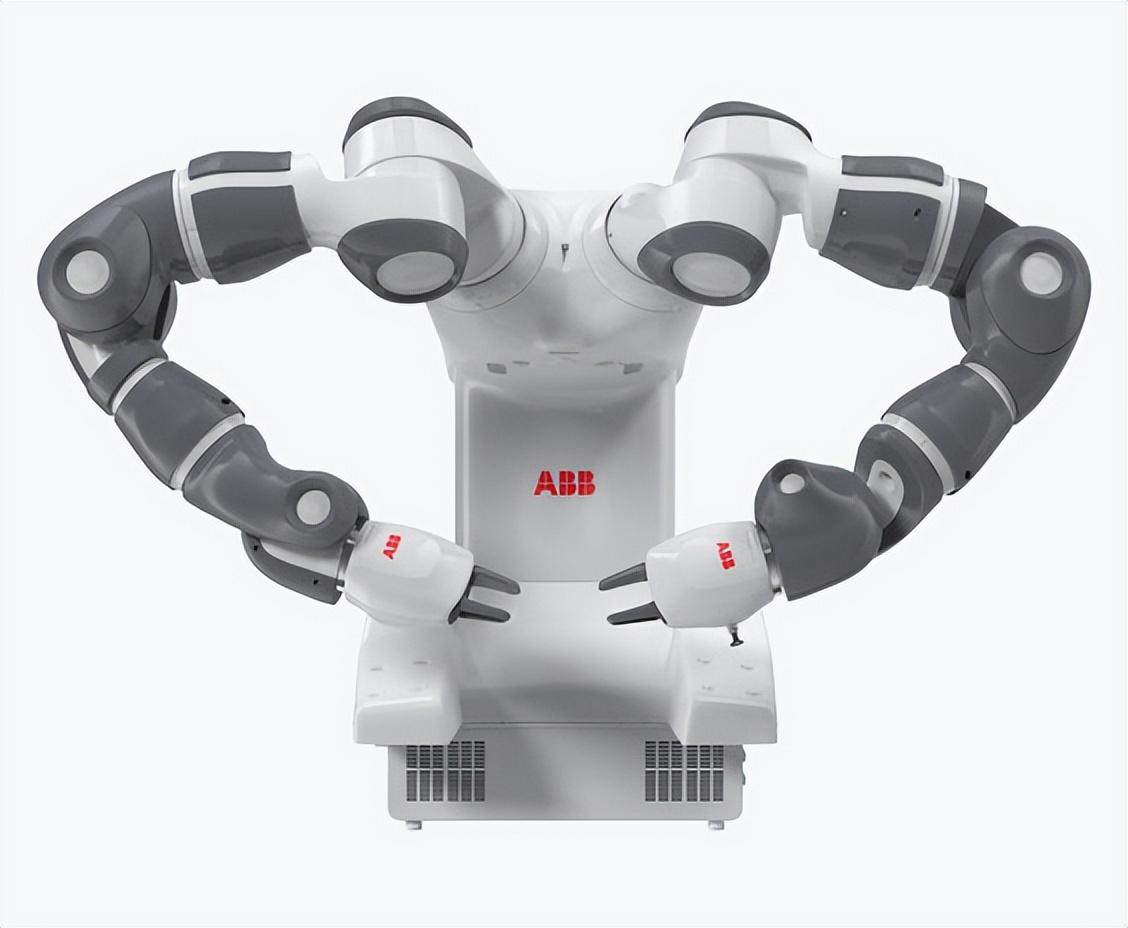
协作机器人